|
||||||||||||||||||||
 |
1. Descripcion del sistema SURTASS LFA
Se basa en recoger datos acústicos y analizarlos, esto es, en escuchar lo que ocurre bajo la superficie del mar. LFA (Low Frequency Active). Es un sistema activo de baja frecuencia, los sistemas activos se usan cuando el objetivo es demasiado silencioso como para ser detectados tan solo mediante el uso del sistema pasivo des escucha SURTAS. El sonar activo detecta objetos subacuaticos enviando un pulso de sonido que rebota en los objetos y retornando como un eco que el sistema puede detectar, se basa en los mismos principios que la ecolocalización que utilizan algunos animales para orientarse y encontrar comida.
Este sistema se desarrolló ya para poder detectar a gran distancia los, cada vez mas silenciosos, submarinos. 2. Fundamentos del sonido bajo el agua• Descripción del sonido El sonido es una onda de variaciones de presión que se propagan por un medio
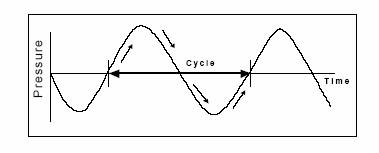
Las variaciones de presión se crean comprimiendo y relajando el medio. Por ejemplo, en el caso del habla humana, las variaciones de presión son creadas por la vibración de las cuerdas vocales. En alguien que hable alto, el movimiento del diafragma crea las variaciones de presión. Una de las formas más simples de variación de presión es un tono puro, que puede ser describido como una función sinusoidal.
Cada ciclo de un tono puro consiste en un intervalo de altas y bajas presiones, y la frecuencia de un tono se mide por el número de ciclos completados en un segundo (Hertz o Hz). La longitud de onda de un tono puro es el espacio en metros recorrido por el sonido en un ciclo. Este depende de la velocidad del sonido en el medio y se calcula comoo la velocidad del soido en el medio dividida por la frecuencia. La velocidad del sonido en el água del mar es aproximadamente de unos 1500 m/s, aunque varía ligeramente. Así la longitud de onda de un tono de 100 Hz el mar es de unos 15m y el de un tono de 500 Hz es de unos 3m. Un sonido de alta frecuencia se dice que tiene un tono o pitch alto (es agudo), realiza muchos ciclos por segundo y en cada oscilación recorre poca distancia; por contrario un sonido de baja frecuencia se dice que tiene un tono o pitch bajo (es grave), realiza pocos ciclos por segundo y en cada oscilación recorre mucha distancia. Como referencia el do (C) central de un piano es de unos 262 Hz (Richardson y al., 1995). El sonido tiende a seguir varios caminos en el océano, por lo que se reciben multiples copies con diferentes retrasos de la señal original. Los ecos son un ejemplo familiar de este fenómeno de multitrayecto en el aire. Para determinar cuales son los caminos que seguirá la transmisión de sonido, una forma es buscar los caminos que llevan el sonido al receptor más rápido. A estos se les llama rayos acústicos. Si la velocidad del sonido fuera constante a lo largo del océano, los rayos acústicos consistirían en segmentos rectilíneos, que se irían reflejando en la superficie y en el fondo. Sin embargo, como la velocidad del sonido no es constante en el océano, la mayor parte de los rayos son curvados.
• Velocidad del sonido en el agua del mar La velocidad del sonido es aproximadamente de 1500 m/s en el agua del mar y varía con la densidad del agua que a su vez varía con la temperatura de agua, la salinidad (cantidad de sal en el agua), y la presión (por lo que también depende de la profundidad). La velocidad del sonido aumenta con la temperatura y profundidad (presión), también se incrementa, en un menor grado con la salinidad. La variación de la velocidad del sonido con la profundidad es generalmente presentada por el sound speed profile (SSP) (perfil de velocidad del sonido). El perfil se divide en varias capas que tienen diferentes características:
Equivalencias
En las aguas poco profundas de las regiones costeras y en los taludes continentales, el SSP está muy influido por los cambios de temperatura en la superficie, los cambios de salinidad, y las corrientes de agua. Como resultado, tiende a ser irregular e impredecible, y contiene numerosos gradientes locales que duran poco tiempo. Cuando la velocidad del sonido varía gradualmente tanto horizontal como verticalmente existe un gradiente en la velocidad del sonido y este se propaga a lo largo de caminos curvados más que de líneas rectas. A este fenómeno se le llama refracción. Una variación en la velocidad del sonido con la profundidad es un gradiente vertical de velocidad. La magnitud de este gradiente es el cambio en velocidad dividido por el cambio en la dimensión lineal. La cantidad de curvatura del rayo está relaccionada directamente con el gradiente de velocidad:
• Medición de la intensidad del sonido Las mediciones del sonido se pueden expresar de dos formas: como intensidad o como presión. La intensidad del sonido es la energía media transmitida a través de un área unitaria en una dirección específica , se expresa en watts por metro cuadrado Una vez que se ha elegido una referencia de presión, se necesita un método para relaccionar los diferentes cocientes de presión entre sí. Como nuestro oído responde logarítmicamente al juzgar la intensidad relativa de dos sonidos, se ha adoptado una escala logarítmica para las intensidades sonoras que se mide en decibelios (dB). Todas las medidas en decibelios se refieren al cociente entre la presión medida y la presión de referencia. La naturaleza logarítmica de la escala implica que un incremento de 10 dB equivale a multiplicar por 10 la potencia del sonido (20 dB es como multiplicarla por 20 o 30 dB es como hacerlo por 30). Los humanos percibimos un incremento de 10 dB en el sonido cómo si su intensidad se hubiera duplicado o una reducción de 10 dB cómo si se hubiera reducido a la mitad. La frase nivel de presión sonora implica una medida en decibelios y un nivel de referencia de presión que ha sido usado como denominador del cociente. Comparar valores en decibelios de varias fuentes de ruido debe hacerse con cuidado ya que esos vlores no siempre representan la misma información. Por ejemplo, valores espectrales los niveles de potencia en intervalos de 1 Hz los niveles de emisión de banda ancha son la potencia total sobre un ancho de banda determinado o una porción del espectro emitido por la fuente de ruido. • Nivel de la fuente en el campo cercano y en el campo lejano Un método de formar un haz muy ancho de sonido subacuatico es usar un array lineal vertical (VLA) de fuentes puntuales. El haz es formado por fuentes equiespaciadas a una distancia de aproximadamente media longitud de onda. Cuando operan coherentemente con cada fuente encendida al mismo tiempo, con la misma fase, el mismo nivel de potencia y la misma frecuencia, la salida combinada de las fuentes da el deseado haz horizontal ancho. Este haz, sin embargo, no está totalmente formado hasta una cierta distancia del VLA, en la región llamada campo lejano. La región más cercana donde el haz todavía se está formando se llama campo cercano. Lo que está ocurriendo físicamente es que los niveles de las fuentes individuales sólo se sumarán con el mismo nivel de potencia y fase cuando la distancia a cada proyector sea aproximadamente la misma. Acústicamente esto significa que la diferencia en distancia desde cada fuente a un punto en el eje horizontal que verticalmente está a la altura del centro del VLA, debe ser menor que un cuarto de la longitud de onda. Para el sonar SURTASS LFA esta condición se satisface a unos cuantos cientos de metros. Sólo en este punto toda la capacidad del sistema se focaliza en el haz. A causa de este punto a unos cientos de metros del VLA, las pérdidas de transmisión (TL transmisión losses) hacen que el nivel aquí sea de 40 a 50 dB menor que el nivel efectivo en la fuente. El nivel efectivo en la fuente es un valor teórico, hipotéticamente medido a 1 m del VLA en su horizontal, calculado con la formula: Otra forma de ver este fenómeno es ver la forma en que se suman las fuentes individuales hacia el exterior a lo largo del eje horizontal del VLA. Si nos situamos muy cerca del VLA, por ejemplo a 10m, en el campo cercano, sólo se combinarán coherentemente los niveles de dos o tres fuentes, mientras que el resto estarán demasiado lejos como para contribuir con una potencia similar. A esta distancia el nivel de cada uno de las dos fuentes centrales del VLA, que son las que quedan más cerca, debería ser de 195 dB (215 dB 20 dB de pérdidas de transmisión debidas a la propagación esférica). Sumando las dos fuentes debería producir un nivel de 201 dB ( El siguiente efecto es un nivel en el campo cercano casi constante, aunque disminuye poco a poco con la distancia. Este nivel es equivalente al nivel original de una fuente individual, o menor. Como se ha descrito antes, esta región con un nivel casi constante es el resultado de la combinación de las diferentes contribuciones individuales de las fuentes que decaen con la distancia al VLA, compensándose con el incremento del nivel del haz total a medida que se añaden coherentemente más fuentes. Sólo a distancias mayores que un cientos de metros es cuando el VLA funciona finalmente cómo una única fuente. En este punto el nivel del haz combinado es de unos 20 dB menor que el de una fuente individual. 3.2- Comparación entre mediciones de intensidad del sonido en el aire y en el agua Comparar los niveles de intensidad del sonido en el agua y en el aire debe hacerse con cuidado. Primero debido a las convenciones aceptadas, la referencia estándar de presión en el aire es de 20 µPa frente a 1 µPa del agua, lo que da una diferencia de 26 dB entre ellas. Esto se basa en la relación de:
Segundo, debido a las grande diferencias de impedancia entre el agua y el aire, se necesita una mayor potencia (o intensidad) en el agua que en el aire para producir un sonido de intensidad equivalente. La intensidad acústica se define así:
Donde
Combinando estos dos factores, la diferencia entre las referencias estándar y entre las impedancias del aire y el agua, se tiene que hay 61.5 dB (26+35.5=61.5) de diferencia entre la misma medida en aire o en agua, por lo que para un nivel de intensidad sonora dada en el agua hay que restarle 61.5 dB para obtener su nivel equivalente en el aire. Todos los niveles de intensidad sonora que se dan son medidos en el agua con los valores estándar para el agua a no ser que se especifique otra cosa y los niveles en el origen son medidos a 1 m de distancia de la fuente. 4- Propagación del sonido bajo el agua Para determinar la presión recibida de un sonido de una fuente lejana, hay que tener en cuente los factores del entorno que pueden influir en la propagación subacuatica de la energía del sonido, estos factores del entorno incluyen: • perdidas en la transmisión • reflexión • dispersión (scattering) 4.1- Perdidas en la transisión Cuando un sonido viaja a través del océano, la intensidad asociada con el frente de onda disminuye, se atenua. Esta reducción de la intensidad es a lo que se llama perdidas en la transmisión (TL). La perdida total en la propagación es la diferencia entre la intensidad del sonido en un punto cercano a la fuente y en un punto lejano. Las perdidas en la propagación son causadas por numerosos factores, de los que los principales son perdidas por absorción y por expansión del frente de onda (cuanto más lejos de la fuente mayor superficie abarca el frente de onda con la misma o menor, si se tiene en cuenta la absorción, energía que en el origen). Estas perdidas ocurren con todas las transmisiones subacuaticas. Las perdidas en la transmisión del sonido dependen de lo siguiente: • Frecuencia: La frecuencia afecta a la atenuación, esto es como de lejos pueden las ondas viajar antes de haber perdido tanta energía como para no poder hacer vibrar el medio. • Expansión: La expansión del frente de onda hace que la energía total asociada al frente de onda se distribuya entre una superficie cada vez mayor, resultando una intensidad cada vez menor. Estas perdidas no dependen de la frecuencia. En aguas profundas y homogéneas , el sonido originalmente se expande esféricamente (propagación esférica) y su intensidad disminuye en proporción con el cuadrado de la distancia( • Absorción: La absorción es la transformación de energía acústica en calor. Para que un sonido se propage por un medio, este debe ser movido. La viscosidad del medio, su capacidad para resistirse a los movimientos de flujos, causa la absorción. La energía del sonido también es absorbida por la relajación iónica o dilatación de las bandas químicas que mantienen, por ejemplo unidas las moléculas de sulfato de magnesio (
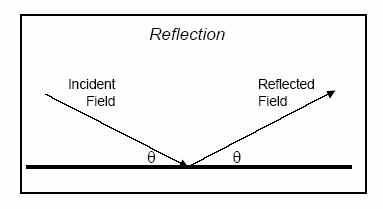
4.2- Reflexión y dispersión
Cuando las ondas sonoras interaccionan con una frontera dura, como la superficie del mar, el fondo marino, la flora y fauna del medio marino o en general cualquier objeto que esté dentro del agua, puede ocurrir uno de los dos procesos. Si la frontera es lisa en relacción con la longitud de onda del sonido, este será reflejado coherentemente con un ángulo igual al de incidencia.
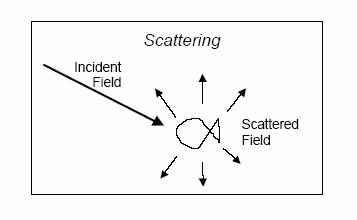
Sin embargo si la superficie es rugosa a la escala de la longitud de onda el sonido se dispersará en todas las direcciones.
5- Camino de los rayos acústicos Para visualizar la propagación del sonido en el agua, se usan los rayos acústicos que dan las diferentes posiciones del frente de ondas. Los rayos describen a que lugar del espacio está siendo transmitido el sonido. La distancia entre rayos adyacentes muestra las perdidas en la transmisión debidas a la expansión del frente de ondas.
5.1- Conductos de superficie Normalmente, la capa superior del océano está bien mezclada, esto es hay un valor constante para la temperatura y la salinidad excepto en invierno cerca de los polos. El sonar SURTASS LFA opera por debajo de los conductos superficiales. En el caso anterior realmente hay medio conducto. A causa del efecto de la profundidad (presión), las capas superficiales exhiben un ligero gradiente positivo de velocidad del sonido, y los rayos de sonido emitidos desde una fuente que se encuentre en esta capa se refractan hacia arriba y se reflejan en la superficie. Debido a esto los rayos acústicos se mantienen en esta capa, por eso a esta capa a menudo se le llama conducto. En los conductos superficiales, la distancia máxima de recepción (a qué distancia puede viajar el sonido) más que de la frecuencia del sonido, depende del SSP (perfil de velocidad del sonido), de la pendiente del fondo y de la profundidad. Como regla general, la propagación en el conducto superficial mejora al aumentar la profundidad. Finalmente , los conductos superficiales también están limitados por las variaciones en masas de agua cercanas a la superficie (por ejemplo, las condiciones térmicas del océano que determinan el conducto pueden desaparecer a una determinada distancia, de manera que ya no atrapen más el sonido). 5.2- Canales de sonido La variación de la velocidad del sonido con la profundidad hace que los rayos sigan caminos curvados. Una región en la que la velocidad del sonido disminuya con la profundidad hasta un valor mínimo y a partir de allí vuelva a aumentar se le llama canal de sonido. Por encima de la profundidad de velocidad mínima los rayos de sonido se refractan hacia abajo, y por debajo de esta lo hacen hacia arriba, asi que los rayos de sonido que se originan en el canal quedan atrapados en él. Esta forma de propagación recibe el nombre de propagación por canal de sonido y permite las mínimas pérdidas de transmisión a lo largo del camino, dando como resultado una transmisión de largo alcance. 5.3- Rebotes en el fondo Los rebotes en el fondo del océano pueden extender el alcance de propagación de las ondas de sonido. El efecto de los rebotes en el fondo es se devuelve la energía sonora que había sido llevada hasta allí por refracción a través del agua, permitiendo transmisiones de largo alcance. A bajas frecuencias, algo de energía penetra en la capa de sedimentos del fondo del mar y desde aquí es refractada de nuevo a la frontera entre el agua y el fondo del mar, donde vuelve al agua. Esta refracción desde el fondo marino, no reflexión, es mecanismo predominante de retorno de energía. A frecuencias medias o altas (mayores de 1000 Hz), la reflexión es el mecanismo predominante de retorno de energía ya que la onda es reflejada en la capa de sedimentos del fondo marino sin penetrar en ella. Los principales factores que afectan a la transmisión por rebotes en el fondo son la frecuencia del sonido, la profundidad del agua, el ángulo de incidencia y la composición y relieve del fondo marino. Un fondo llano produce la mayor precisión a la hora de estimar la distancia y rumbo en este modo de transmisión. 5.4- Zonas de convergencia Las zonas de convergencia (CZ) son casos especiales del efecto canal de sonido. Cuando la capa superficial es delgada o comienzan las refracciones hacia abajo, se crean regiones cerca de la superficie del océano donde se focalizan los rayos de sonido, resultando que en esa zona se concentran altos niveles de sonido. La existencia de las zonas de convergencia depende del SSP y de la profundidad del agua. Debido a la refracción hacia debajo en distancias menores, los rayos de sonido que abandonan la zona cercana a la superficie son refractados de nuevo hacia la superficie debido al gradiente positivo de velocidad del sonido producido por la mayor presión de las zonas más profundas. Estos rayos que se reflejan desde las profundidades a menudo se concentran en zonas de la superficie o cerca de ella a cierta distancia de la fuente de sonido. En esta zona los efectos combinados de la refracción hacia abajo y hacia arriba forman la zona de convergencia. Las zonas de convergencia deberían existir siempre que la velocidad del sonido en el fondo del océano, o a una profundidad específica exceda la velocidad del sonido a la profundidad de la fuente de sonido. El exceso de profundidad, a menudo llamado exceso de velocidad del sonido, es la diferencia ente la profundidad del fondo y el limite de profundidad o profundidad crítica (profundidad a la que la velocidad del sonido se iguala a la velocidad del sonido a la profundidad a la que está la fuente de sonido). Típicamente la distancia a la que se producen las zonas de convergencia varía entre 18 y 36 nm ( 33.35 a 66.7 Km ), dependiendo del SSP. La anchura de las zonas de convergencia es el resultado de varias interrelaciones y no se puede correlar con un factor específico. En la practica, sin embargo, la anchura típica es usualmente del orden del 5% al 10% de la distancia a la que se producen, esto es de 1.7 a 6.7 Km 5.5- Caminos de propagación en aguas poco profundas En aguas poco profundas, la propagación se caracteriza normalmente por múltiples caminos de reflexión entre la superficie y el fondo. Así la mayor parte del agua está recorrida por alguno de esos caminos de reflexión solapados. Las propiedades del fondo que afectan a la transmisión del sonido en aguas poco profundas varían considerablemente de una región geográfica a otra. Sin embargo, los fondos más comunes son de arena, arena y cieno, o cieno solo. Los tres factores que más determinan la propagación en aguas poco profundas son:
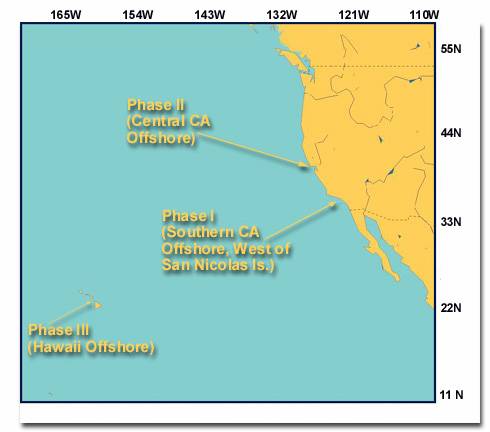
SURTASS LFA : IMPACTOLa meta del estudio es demostrar la ausencia de reacción de especies sensibles al sonido submarino de baja frecuencia producido por el sistema LFA. Si se cumplía la teoría predominante de que un sonido de 140 dB habría que restringir el sistema LFA. Para esto se hicieron pruebas en tres fases: - Fase I (Sep-Oct 97)
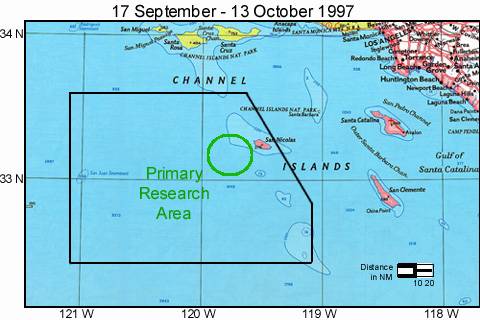
FASE IObjetivos El objetivo principal de la fase 1 es determinar si la exposición a sonidos de baja frecuencia provoca reacciones en la alimentación de las ballenas azules y los rorcuales comunes. La meta es caracterizar como varían las reacciones de estas ballenas con los sonidos, dependiendo de: • La intensidad del sonido recibido. • Los cambios en la intensidad. • Si la distancia a la ballena es constante o la fuente se está acercando. El mapa de abajo muestra el área de pruebas, al oeste de la isla de San Nicolás, en la costa sur de California.
Recursos: Barco de investigación Cory Chouest
Barco de investigación Dariabar
Barco de investigación John Martin
Reconocimientos aereos
Pop-Ups
SOSUS
Resultados
*Para escuchar un ejemplo de las pruebas realizadas en cuanto al canto de las ballenas pinche en el enlace. FASE IIObjetivos
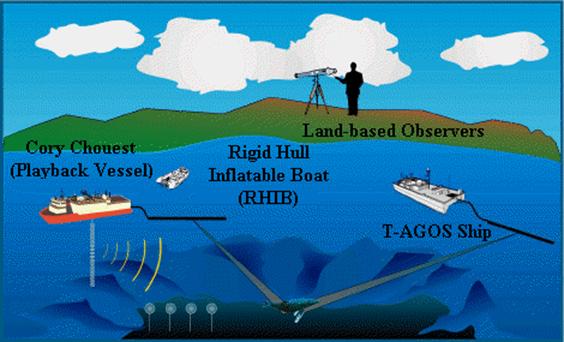
Recursos Para esta fase de la investigación , una fuente de sonido se amarró cerca de la costa central de California, cerca de la punta Buchon. Desde la costa, observadores siguieron a las ballenas usando métodos que proporcionaban medidas de gran sensibilidad respecto a las respuestas de las ballenas a la fuente de sonido. Los observadores, en el barco con sonido pregrabado (un barco de 100 pies (unos 33 m ) de largo) también monitorizaban cuidadosamente a los mamíferos marinos para dejar de transmitir en el caso de que se produjera alguna reacción preocupante o si alguno de los mamíferos marinos se aproximara tanto que el sonido al que fuera expuesto pudiera exceder el nivel máximo planeado de 155dB.
Resultados
FASE IIIObjetivos
Medios Para esta fase del estudio, el barco de investigación Cory Chouest operaba cerca de la costa oeste de la gran isla de Hawai. Un barco con un detector SURTAS pasivo también tomó parte para escuchar los sonidos de las ballenas. Observadores seguirán a las ballenas desde la costa. Se desplegarán hidrófonos calibrados desde un pequeño barco para medir los niveles de recepción (RL), verificar los modelos de perdidas de transmisión(TL) y mejorar la determinación del campo de sonido al que las ballenas son expuestas. Este barco también siguió ballenas individuales y describió con detalle sus comportamientos en la superficie antes durante y después de las transmisiones LFA. Observaciones acústicas y visuales en el barco de grabación Cory Chouest monitorizó cuidadosamente a los mamíferos marinos para interrumpir la transmisión en caso de que se observarán reacciones preocupantes o de que alguno se acercara lo suficiente como para que pudiera ser expuesto a niveles de intensidad superiores al máximo fijado para el experimento.
Resultados
Para más infomación ver el siguiente vídeo
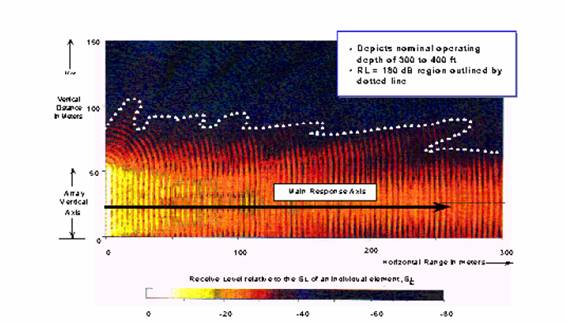
Sonar HF/M3 (High Frequency Marine Mammal Monitoring)A- Requerimientos del sistema1. Requisitos generalesEl uso principal del sistema es la detección de mamíferos marinos que estén en las cercanías del sistema de sonar activo de baja frecuencia (LFA), será por tanto un sistema de corto alcance. El objetivo es evitar que haya mamiferos marinos expuestos a mas de 180 dB de sonido subacuático debido al sonar LFA; para esto se usará este sonar activo de alta frecuencia ya que es la forma de poder detectar animales subacuaticos que no estén emitiendo sonidos en ese momento o con malas condiciones de visibilidad. La zona de mitigación del LFA es el volumen de agua en el cual hay sonidos de más de 180 dB. En condiciones normales tiene un radio de 1Km y a una profundidad de entre 87 y 157 metros (El centro del array de emisores LFA está a unos 122 m ).
Niveles de atenuación de una fuente individual del LFA: Los ejes horizontal y vertical están en metros, y los colores indican la atenuación en dB respecto al nivel en la fuente.
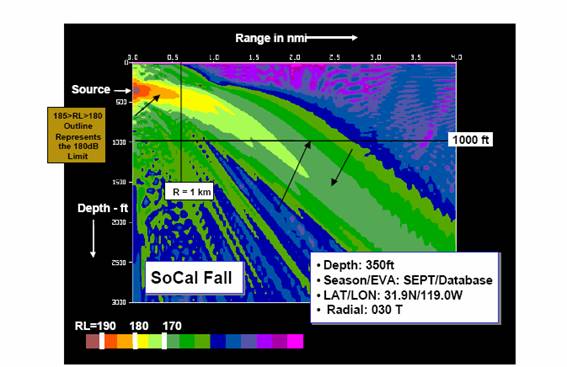
Intensidades del sonido producido por el sistema LFA completo:
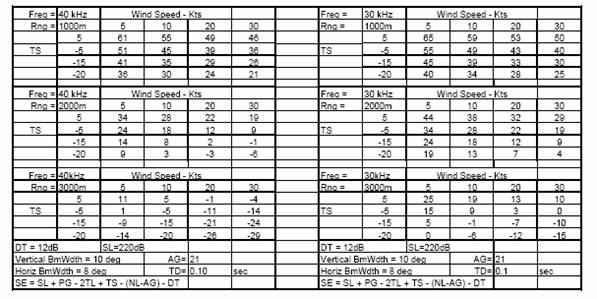
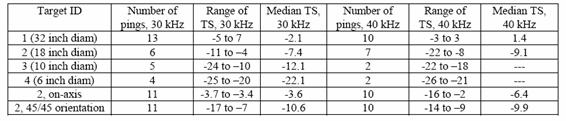
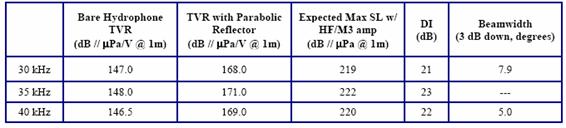
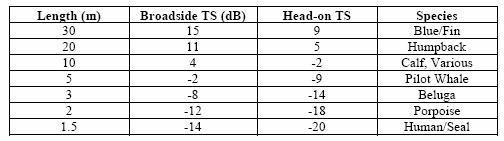
Este sonar usa pulsos activos de más de 30 KHz, siendo muy similar a los que se usan para encontrar peces y minas. Como se ve en la tabla siguiente, el nivel de fuente requerido por el sonar HFM3 para detectar a los animales de la segunda tabla, es del orden de 220dB subacuáticos en los peores casos (animales pequeños y con gran ruido ambiental);debido a estos niveles, si algún animal se acercara mucho a la fuente del sonar, habría que reducir su potencia para que no se superaran los 180 dB. La frecuencia del sonar coincide además con la que usan para ecolocalización.
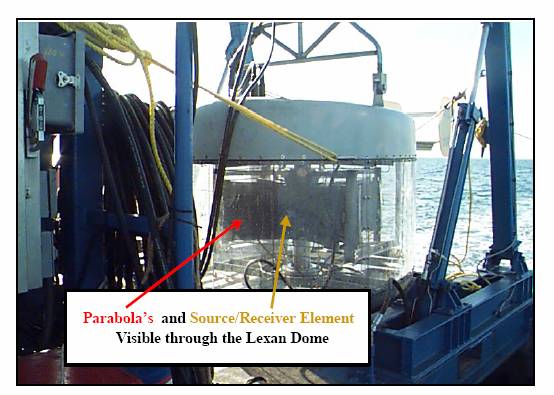
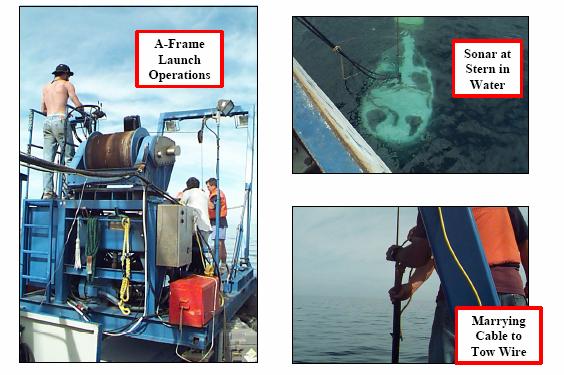
Para este sistema se usarán 4 transductores que se colocarán en la parte superior del array del LFA. El sistema tiene, al detectar la vida marina, se puede usar para localizar y seguir ballenas, bancos de peces, etc. Por esto, puede ser muy útil para estudios de la vida submarina. 2.diseñoEn la siguiente fotografía se ve el array de 4 cuadrantes con componentes de emisión y recepción a bordo del buque de investigación Cory Chouest , además va equipado con un anillo deslizante por lo que el equipo estará en continua rotación durante su funcionamiento, evitando así los ángulos muertos.
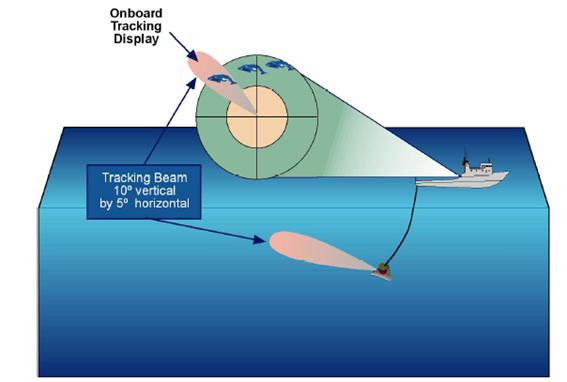
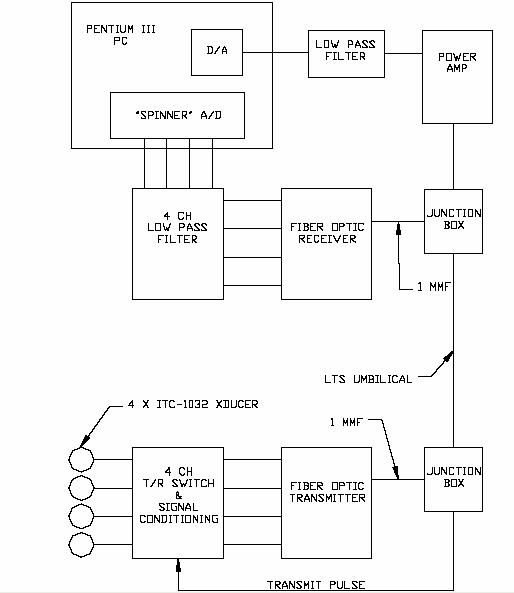
En la siguiente figura se ve una representación esquemática de los componentes del sonar, que consiste en una cabeza instrumental que contiene los 4 transductores (emisores y receptores); cada uno enfocado a una pantalla acústica. Cada fuente de sonido se puede enfocar en horizontal con una precisión de 8 grados y vertical de unos 10 grados cuando emiten a unos 30 KHz (aunque puede emitir entre 30 y 40 KHz, se espera que la banda más usada sea entorno a 30 KHz).
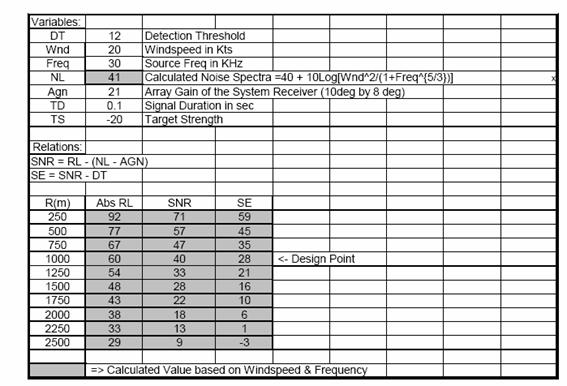
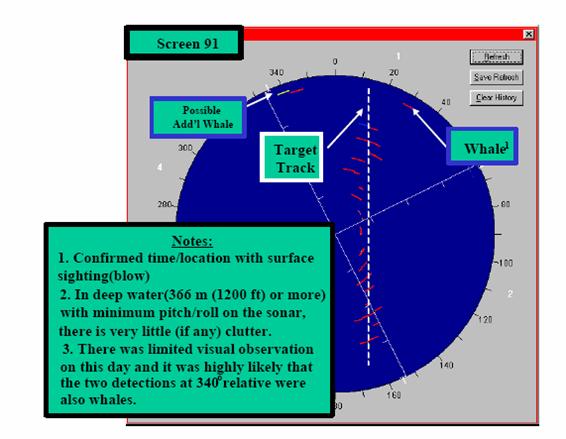
A bordo del barco irá la parte de energía y procesamiento, esto consistirá en un amplificador de potencia, una caja de acondicionamiento de señal con filtros anti-aliasing, y un PC equipado con tarjetas de conversión analógico/digital (A/D), de procesado de señal(DSP) y de transmisión. El display muestra la colocación de cualquier objeto de forma polar que devuelva una señal superior al umbral, resultando una apariencia muy similar a la de una pantalla de radar. La capacidad de detección del sistema viene dada por el término exceso de señal (SE), que se obtiene de la ecuación:
Donde:
El nivel de la señal recibida (RL) viene dado por:
Entonces, la señal recibida menor será, en función del rango, y asumiendo que
En la siguiente tabla se ven los resultados de esta ecuación para distancias de 250 a 2500 metros , una velocidad del viento de 20 nudos ( 37 Km/h ) y un umbral de deteción de 12 dB:
El siguiente gráfico muestra las TL por zonas, con el sonar a 110 m de profanidad:
B-Test y Evaluación
1. Primeras pruebasUna de las primeras cosas que se probaron fue una unidad individual de emisión y recepción (S/R) altamente enfocable en el lago Séneca, en el estado de Nueva York, obteniendose los siguientes parámetros operacionales:
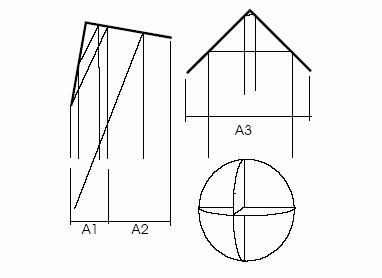
El modelo de propagación usado fue BELLHOP, que implementa un algoritmo robusto y preciso que describe un haz gaussiano con un número finito de elementos. Para obtener la TS se usaron objetivos artificiales que consistian en 3 discos ortogonales. Había objetivos de 4 diámetros distintos (6, 10, 18 y 32 pulgadas ).
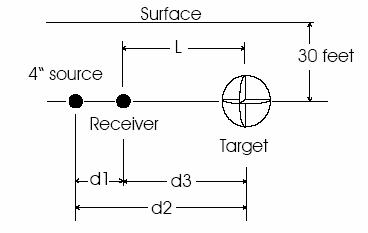
Para las pruebas se usaron esferas de 4 pulgadas como emisores, a 1,9- 2,7 m de estas se colocó un hidrófobo como receptor.
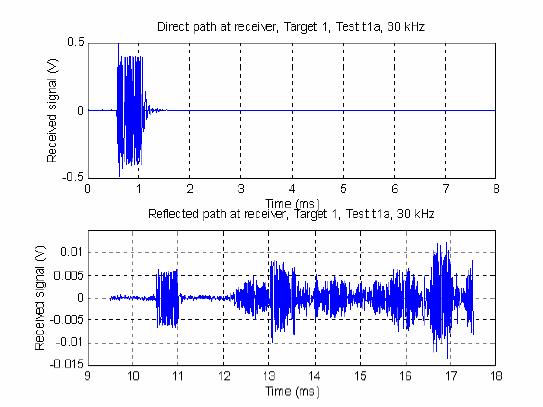
La fuente emitía pulsos cortos a 30 y 40 KHz, y la señal recibida en el hidrófono se mostraba en un analizador de espectros HP3562, tras haber eliminado las reflexiones que no eran debidas al objetivo. Las señales típicas capturadas:
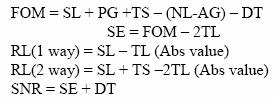
En este experimento TS viene dado por:
Donde:
Resultados de la prueba:
2. Evaluación de ingenieríaLos objetivos son probar el sistema detectando y siguiendo objetivos hechos por el hombre primero, y ballenas después. Pruebas en Punta Hueneme, California: Las pruebas comenzaron aquí el 8 de marzo de 1999, con el primer test de inmrsión en água del mar. En esta fase, las características del sonar estaban cerca de las del diseño final. En esta parte, era muy importante al desplegar el sistema a una profundidad especifica y el mantenerlo en su posición correcta. Uno de los principales objetivos en esta fase era obtener la figura de mérito del sistema (FOM).
La FOM se calcula así:
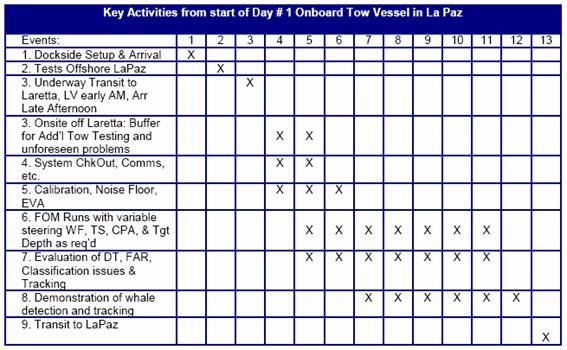
Otros objetivos eran encontrar la probabilidad de falsa alarma (FAR) para los parámetros del sistema de SNR y umbral de detección, evaluar la capacidad de clasificación de los objetivos y su seguimiento y el modelado de la acústica del entorno. Pruebas en Baja, Mejico: Las pruebas continuaron en Baja, a bordo del barco Pto. Chale, que iba equipado con GPS, la salida del GPS se daba de tal forma que luego se pudiera reconstruir las rutas por medio de rutinas como MATLAB, comunicaciones UHF/VHF, perfiles de velocidad del sonido (SVP), modelos de la acustica del entorno (EVA), fathometro (un dispositivo que se usa para medir la topología del fondo del océano, esto es, para hacer batimetría) y medidores de profundidad. Planning de las pruebas:
A continuación vemos la instalación del equipo:
Esquemas de funcionamiento:
Las zonas de operación en las pruebas de Baja:
Muestra de un seguimiento de una ballena por sonar:
Señal típica devuelta por una ballena:
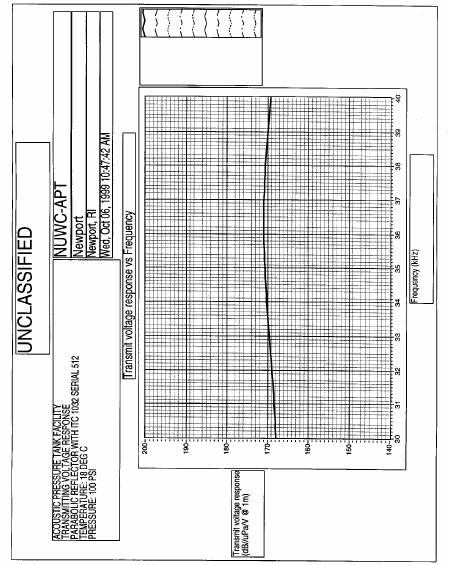
3. Pruebas de profundidad:Se decidió olocar el sonar HF junto al LFA, por lo que hubo que cambiar el diseño del recubrimiento del sonar para que aguantara a mayor profundidad, hasta unos 305 m . Para ello se eligió un recubrimiento parabólico de fibra de vidrio. Las pruebas se realizaron en un tanque de presión(APTF) el 6 de octubre de 1999. Esquema del APTF:
Un transductor:
Uno de los reflectores parabólicos:
Datos obtenidos:
Para el reflector parabólico:
Indice de directividad (DI) aproximado para el reflector parabólico: El reflector parabólico sobrevivió y pasó las pruebas bien hasta los 243 m , a los 305 m perdió la directividad debido a que explotaron unas pequeñas burbujas de aire que se habían producido durante su construcción, por lo que se decidió refinar el proceso de fabricación y hacer pruebas de profundidad a todos los reflectores del sonar HFM3. Resultados:
Diagramas de emisión:
4. Pruebas de transmisión de la cúpula de cristal plastificado reforzado (GRP)Se realizaron pruebas para ver las pérdidas de transmisión de la GRP, calculada así:
Se obtuvieron perdidas en incidencia normal menores de 1,5 dB, que entra dentro de lo deseable por lo que el proceso de fabricación de estas es aceptable. Perdidas de transmisión frente al ángulo de incidencia:
y en pruebas anteriores (ante de cambiar el diseño):
5. Pruebas en el Cory Chouest, FY00Aquí se realizaron las pruebas finales con el sistema completo. Un resumen de las localizaciones y las pruebas realizadas:
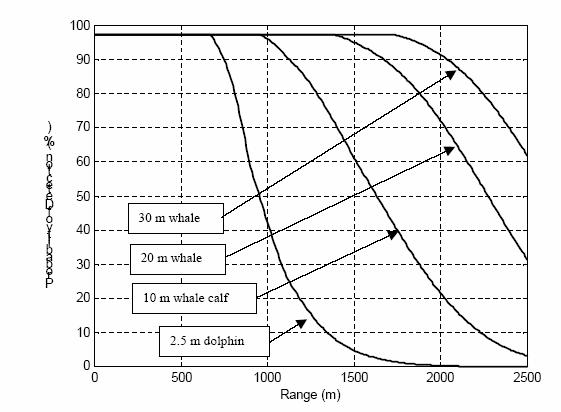
Probabilidades de detección para animales de varias especies:
Las probabilidades anteriores son para animales aislados, así si hay N animales, la probabilidad de detectarlos es: C- Descripción del sistema El sonar HF/M3 está compuesto de varios módulos; le cuerpo remolcado, que alberga los emisores/receptores del sonar, está unido con el resto del sistema que va a bordo del barco mediante 2 canales de fibra óptica y 4 coondutores de cobre; el equipo que va en el barco incluye un amplificador, una fuente de alimentación DC, un PC con procesador Pentium III, un MODEM de fibra óptica RS-485 y un receptor de fibra óptica del enlace de datos.
Fotografía del cuerpo remolcado del sonar, los emisores/receptores van dentro de la envoltura negra:
Estimación del rendimiento del sonar HF/M3IntroducciónEl objetivo principal es estimar las probabilidades de detección y de falsa alarma en condiciones normales de operación. Estas estimaciones se realizan usando un análisis simplificado de las características del receptor. Los pasos a seguir son los siguientes:
La principal limitación de este método es que, dados la multitud de factores y procesos aleatorios que están asociados con los niveles de interferencia recibidos, las predicciones teóricas de estos son intratables. Por lo tanto los modelos estadísticos se obtendrán a partir de datos medidos durante las pruebas. El rango de los parámetros de la forma de onda, como ancho de banda y duración, para los cuales las estimaciones son válidas están limitados a aquellos que se dieron durante la recolección de datos debido a la gran cantidad de factores que intervienen. El objetivo del sonar es detectar a los mamíferos marinos que se acerquen a la zona de mitigación del LFA:
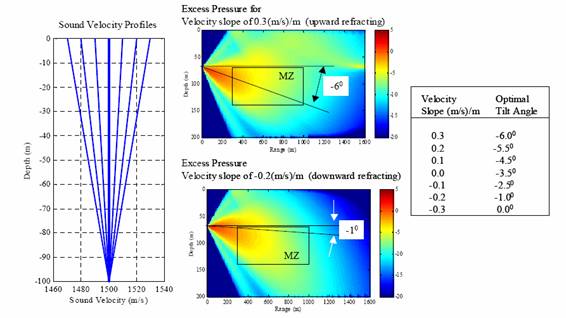
En principio, el sonar operará por encima de la termoclima principal, por lo que se puede suponer que el perfil de velocidad del sonido es predominantemente lineal. En la siguiente figura se ven los potenciales perfiles de velocidad del sonido, las pérdidas de propagación para dos casos y las inclinaciones óptimas para varios perfiles de desnivel y una profundidad del sistema de 70 metros:
Resultados de las pruebasLa capacidad del sistema para detectar desde grandes ballenas hasta delfines se ha verificado en pruebas de campo. Debido a las medidas conservadoras tomadas para estimar el rendimiento del sistema, las capacidades predichas son bastante buenas. En el rango de 200 a 800 m se espera una falsa alarma cada 350 barridos azimutales (horizontales) y las probabilidades de detectar pequeños mamíferos marinos normalmente no bajan del 90%. En el rango de 800 a 1600 m se espera una falsa alarma cada 25 barridos azimutales. Las probabilidades de detectar pequeños mamíferos marinos hasta 250 m más allá de la zona de mitigación del LFA no bajan del 40%. Para grandes animales, como las ballenas, las probabilidades de detección son típicamente mayores del 90% a distancias de más de 1 Km de la zona de mitigación del LFA. FondoConceptos que se han utilizado para obtener las estimaciones de rendimiento del sistema: Detección del objetivoHay numerosos procesos asociados a la detección del objetivo, como el ruido térmico de la electrónica, el ruido de fondo del océano, fluctuaciones aleatorias introducidas en la amplitud y fase de la señal, etc. Los efectos de todos estos procesos en los dos principales parámetros asociados con la detección del objetivo, particularmente el nivel del eco y el de las interferencias, necesitan un tratamiento estadístico de los niveles predichos para la salida. La función de densidad de probabilidad (PDF) se usa para predecir la probabilidad de que una variable aleatoria caiga entre dos valores, que matemáticamente es:
Donde P(y) es la probabilidad de que ocurra el evento y, que en este caso es que la variable aleatoria X tome un valor entre a y b; y p(x) es la función de densidad de la variable aleatoria. La siguiente figura muestra las funciones de densidad de probabilidad para las interferencias y para los ecos, así como un posible umbral:
De donde podríamos calcular fácilmente la probabilidad de falsa alarma y de detección:
Con
Con
Si asumimos que
Donde Procesado de señalEl HF/M3 usa un barrido de FM con frecuencias centrales de 30-35 KHz, anchos de banda (BW) de 1500-1600Hz y pulsos de 10-40ms de duración Se usa un filtro autocorrelador para incrementar la SNR y minimizar el ruido provocado por la superficie. Ecuaciones del sonarEl exceso de señal se define como la SNR a la salida del sistema y se calcula:
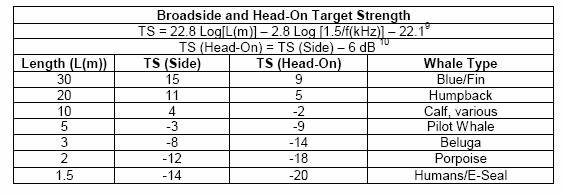
Donde SL es la intensidad en el origen; 2TL son las pérdidas durante la propagación en el camino de ida y vuelta; TS es la intensidad del objetivo, esto es, la relación entre las intensidades de la señal incidente y la reflejada; PG es la ganancia en el procesado de la señal; IL es el nivel de las interferencias y DT es el umbral de detección. Todas las magnitudes en dB. Tabla con varias TS estimadas para distintas especies marinas:
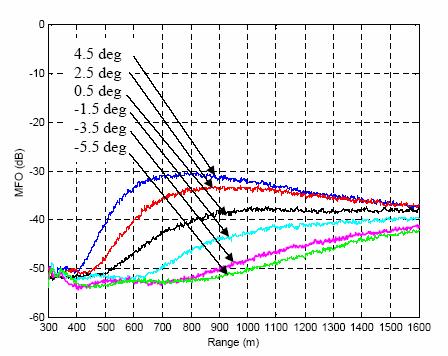
Figura con el efecto de la inclinación en el nivel medio de las interferencias:
En esta figura se pueden destacar varias cosas:
Basándose en esto se puede considerar el desorden superficial como la principal fuente de interferencias para el algoritmo de detección del HF/M3. Algoritmo de detecciónTabla con los resultados de las pruebas de Hawai en el 2000:
Los datos de la tabla anterior fueron recogidos con una inclinación de -1,5 grados. La inclinación óptima estimada para este caso (velocidad del sonido aproximadamente constante en una capa superficial de 150m de profundidad) era de -3,5 grados. Modelo del objetivoSe uso un objetivo esférico con TS=-8dB, luego el Cory Chouest realizó varias pasadas, las más cercanas a 300 y 1500 m del objetivo. Figura con los resultados de una pasada:
Tabla con los resultados de las distintas pasadas:
Figura con loas presiones acústicas predichas en función de la distancia para distintas variaciones de la velocidad del sonido con la profundidad (dSVP/dD):
Las siguientes figuras muestran como afectan los distintos parámetros de la forma de onda al valor medio de la intensidad de las interferencias y a su desviación estándar.
Para las predicciones se ha asumido que las interferencias tienen una distribución normal (gaussiana), suposición que en las mediciones se cumple bastante bien. Algoritmo de umbralEl esquema de detección se ha diseñado para maximizar la probabilidad de detección manteniendo un nivel de falsas alarmas aceptable. La siguiente figura muestra la probabilidad de falsa alarma en función del umbral para diferentes varianzas del ruido:
Para el modelo de interferencias se ha usado una desviación estándar de menos de 4 dB. Para mantener una probabilidad de falsa alarma de, como mucho, El umbral se basa en la interferencia media así:
Donde:
Las dos siguientes figuras ilustran el umbral seleccionado. En la figura de la izquierda se ve la interferencia media, el umbral y los niveles medios predichos del el eco para distintas intensidades de objetivo(TS). En la figura de la derecha muestra la desviación estándar de la interferencia y los objetivos. Se asume que todas las probabilidades de distribución son gaussianas:
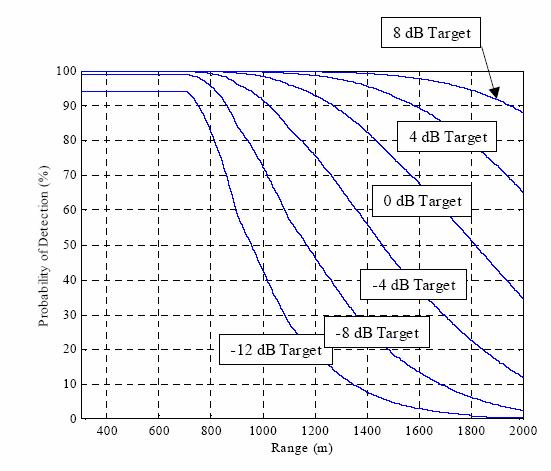
Predicciones de rendimiento bajo condiciones normales de operaciónFigura con las probabilidades de detección para distintos TS, asumiendo que el objetivo se encuentra dentro del lóbulo principal:
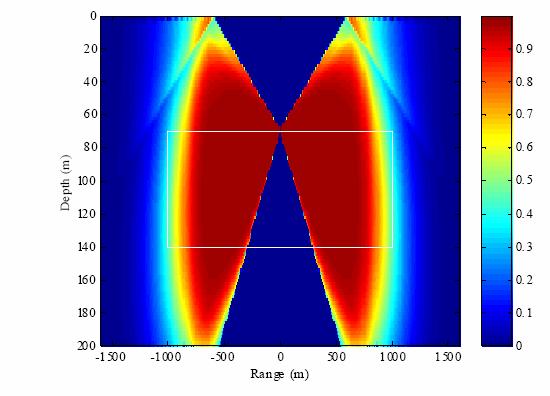
Figura con la probabilidad de detectar un objetivo con TS -4 dB (unos 4 m de largo) en distintas zonas para una velocidad del sonido uniforme:
La probabilidad total de falsa alarma es el número esperado de falsas alarmas por barrido azimutal, para el cual se realizan 45 escaneos. Entonces, la probabilidad total de falsa alarma se puede calcular como:
Donde n es el número de divisiones en la región de interes. En la zona de 200- 800 m hay 350 divisiones y en la de 800- 1600 m hay 450 divisiones. La probabilidad de falsa alarma en la región de 200- 800 m se estima en 1 FA cada 350 barridos azimutales, con la mayoría de FA´s entre los 700 y 800 m , y en la región de 800- 1600 m se espera 1 FA cada 25 barridos azimutales. ConclusionesSe ha elegido el umbral para minimizar la probabilidad de falsa alarma, en el rango de 200- 800 metros , manteniendo la probabilidad de detección para pequeñas especies por encima del 95%. Cuando se buscan las especies mayores, la probabilidad de falsa alarma cae por debajo de 1 cada 1000 barridos. El rendimiento del sistema es relativamente insensible a factores ambientales como la refracción y el estado del mar, siempre que la velocidad del sonido sea aproximadamente lineal y no varíe demasiado con la profundidad. Los factores que provocan una mayor desviación estándar de las interferencias son los cabeceos y rotaciones de los sensores del sonar producidos por los movimientos del barco y las corrientes. Las probabilidades de falsa alarma se pueden reducir, si se tiene en cuenta lo anterior, mediante programas que no tengan en cuenta las mediciones hechas en los momentos en que los sensores registran un mayor movimiento. Otra forma de reducir la probabilidad de falsa alarma es usar criterios de detección del tipo M de N, esto es, que se de cómo detección sólo cuando en N escaneos se haya superado el umbral de detección al menos M veces. |
 |
||||||||||||||||||
 |
 |
|||||||||||||||||||
 SURTASS (Surveillance Towed Array Sensor System ). Es un sistema de vigilancia que utiliza un gran número de sensores acústicos remolcados y que puede detectar sonidos subacuaticos
SURTASS (Surveillance Towed Array Sensor System ). Es un sistema de vigilancia que utiliza un gran número de sensores acústicos remolcados y que puede detectar sonidos subacuaticos